See Appendix D of the Kinetix 5100 User Manual for a full walk-through.
To execute the full closed-loop control, follow these steps:
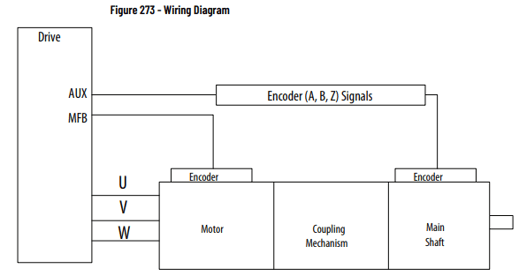
1. Connect auxiliary encoder (OA, OB, OZ) to the AUX port.
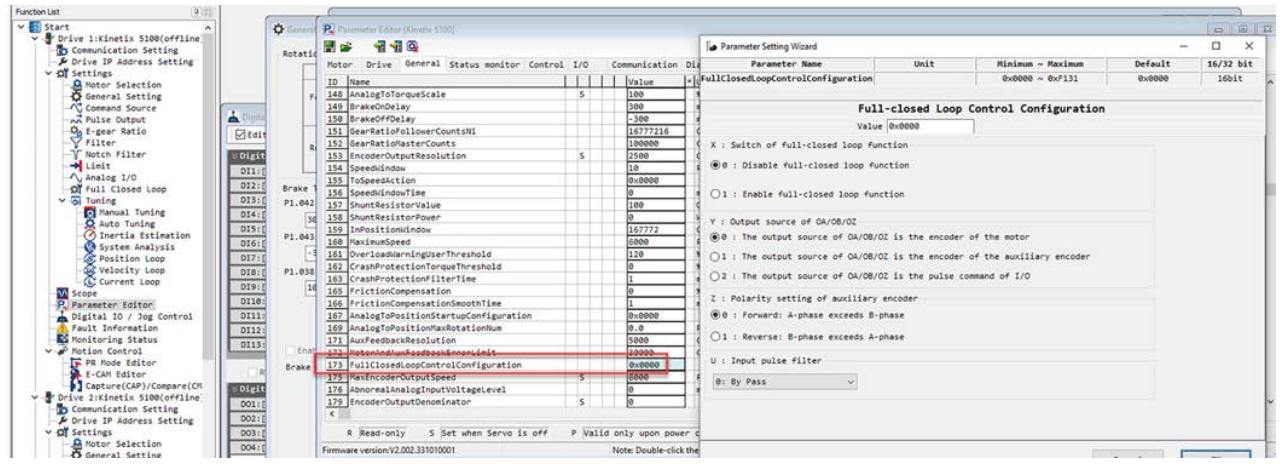
2. Use KNX5100C software Function List>Parameter Editor>General to
Enable full-closed loop function (x=1).
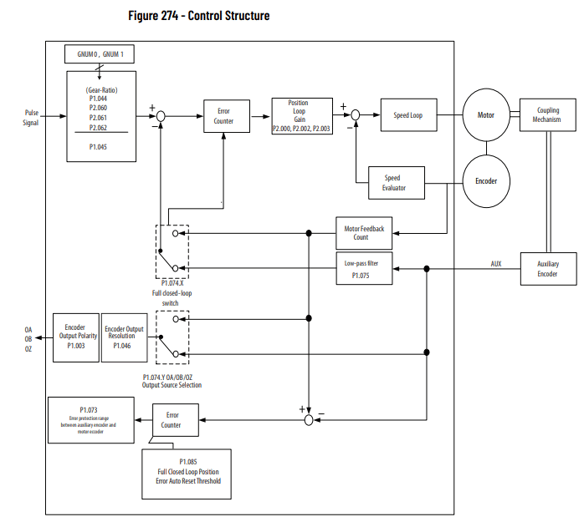
3. Choose the source of the encoder output.
4. Configure the auxiliary encoder resolution ID171 (P1.072)
5. Set the appropriate gear ratio ID151 (P1.044), ID152 (P1.045).
6. Configure the error protection range between the auxiliary encoder and
motor encoder ID172 (P1.073) MotorAndAuxFeedbackErrorLimit.
When commissioning, set (ID172 (P1.073)) with a smaller value to avoid
the motor away due to auxiliary encoder disconnection or polarity
configuration issue.
7. Configure Low-pass filter time constant ID174 (P1.075)
FullHalfClosedLoopLowPassFilterTime.
8. Configure the error auto-reset condition ID677 (P1.085)
FullClosedLoopPositionErrorAutoResetThreshold.
9. Configure encoder output parameters, if necessary ID119 (P1.003.Y),
ID173 (P1.074.Y), ID153 (P1.046), ID175 (P1.076), ID179 (P1.097)).
10. Start full closed-loop control function ID173 (P1.074.X)
FullClosedLoopControlConfiguration.