During normal operation, the brake releases automatically when commanded by the drive or control system. However, during startup, commissioning, troubleshooting, or maintenance activities, manually releasing the brake can be a useful diagnostic tool.
Understanding when and why to perform a manual brake release can help reduce commissioning time and quickly isolate mechanical versus electrical issues.
With an Armorkinetix system this can look slightly different than a more typical drive and servo motor setup.
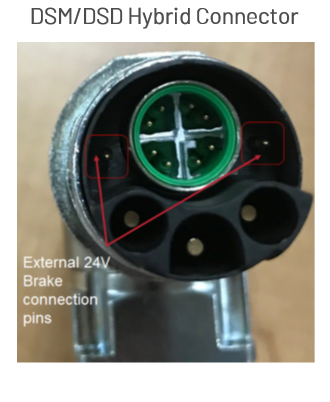
Method 1: Apply 24VDC to Hypbrid connector cable.
(Use this method if the panel has no power)
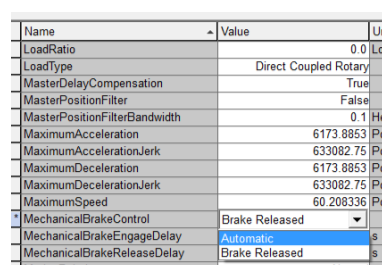
Method 2: Release through Logix Controller
WITH ONLY CONTROL POWER APPLIED. change the Axis.MechanicalBrakeControl Tag to "Brake Released"
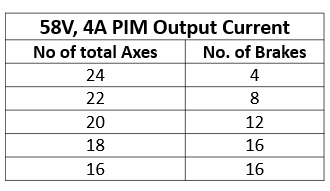
Please note that the PIMs DC output is 58VDC not the typical 24VDC. You are also limited to the number of Brakes you can release with only control power feeding the PIM.