Sizing Formula
Use the following formula to determine the minimum required continuous output power of the power supply:
Minimum Output Power (kW)
Pmin = (X × Y × 0.6) + (Y × 0.2)
Where:
| Variable | Description |
|---|---|
| X | Power rating of the largest motor in the system (kW) |
| Y | Total number of servo axes in the system |
Understanding the Formula
Typical machine duty cycles provide some natural diversity between axes. The factor 0.6 represents a diversity factor for since not all axes operate at maximum power simultaneously. While the additional 0.2 kW per axis accounts for baseline system loading.
Make sure to add additional capacity if your machine:
- Multiple axes accelerate simultaneously such as: Gantry systems or Electronic camming applications.
- High-throughput machines which operate with aggressive motion profiles.
- Potential Future Expansion.
Select Correct Power Supply
Then take the calculated value of Pmin and find select the Power Supply with a greater Continous Output Power.
Example
System Configuration
Incoming Voltage 480V, 60 Hz, 3 phase
| Axis | Motor Size |
| Axis 1 | 3.0 kW |
| Axis 2 | 2.0 kW |
| Axis 3 | 1.0 kW |
| Axis 4 | 1.0 kW |
Largest motor:
X = 3.0 kW
Total axes:
Y = 4
Calculation
Pmin = (3.0 kW × 4 × 0.6) + (4 × 0.2)
Pmin = 7.2 kW + 0.8 kW
Pmin = 8.0 kW
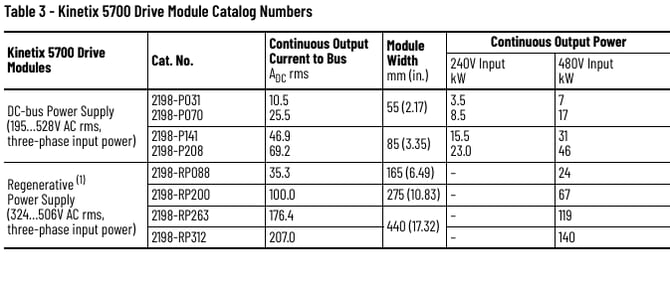
Based on the table above at 480V operation we should use a 2198-P070